Learning-In-The-Loop Optimization: End-To-End Control And Co-Design of Soft Robots Through Learned Deep Latent Representations
Abstract
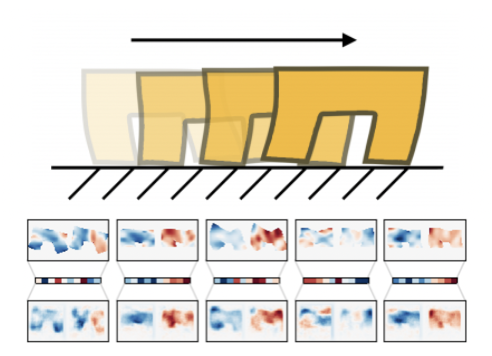
Soft robots have continuum solid bodies that can deform in an infinite number of ways. Controlling soft robots is very challenging as there are no closed form solutions. We present a learning-in-the-loop co-optimization algorithm in which a latent state representation is learned as the robot figures out how to solve the task. Our solution marries hybrid particle-grid-based simulation with deep, variational convolutional autoencoder architectures that can capture salient features of robot dynamics with high efficacy. We demonstrate our dynamics-aware feature learning algorithm on both 2D and 3D soft robots, and show that it is more robust and faster converging than the dynamics-oblivious baseline. We validate the behavior of our algorithm with visualizations of the learned representation.
Yuanming Hu
Ph.D., MIT EECS